Suivez-nous sur X

|
|
|
0,
A,
B,
C,
D,
E,
F,
G,
H,
I,
J,
K,
L,
M,
N,
O,
P,
Q,
R,
S,
T,
U,
V,
W,
X,
Y,
Z,
ALL
|
|
0,
A,
B,
C,
D,
E,
F,
G,
H,
I,
J,
K,
L,
M,
N,
O,
P,
Q,
R,
S,
T,
U,
V,
W,
X,
Y,
Z
|
|
0,
A,
B,
C,
D,
E,
F,
G,
H,
I,
J,
K,
L,
M,
N,
O,
P,
Q,
R,
S,
T,
U,
V,
W,
X,
Y,
Z
|
|
A propos d'Obligement

|
|
David Brunet

|
|
|
|
En pratique : LightWave - La cinématique inverse, les boucles de chaînes IK
(Article écrit par Hilaine Honorin et extrait d'Amiga News - mars 1998)
|
|
Afin de conclure cette série d'articles sur la cinématique inverse, je vous propose ce mois-ci des principes d'animation
orientés vers les "boucles de chaînes IK". Le terme boucle définit le fait qu'un "Object Goal" soit lié (parent) à un "Object
Support" (tronc d'un humain, corps d'insecte...).
Pour ces explications j'ai choisi les pattes d'un insecte. Pour les animer, quatre possibilités sont régulièrement utilisées :
- La morphose.
- Une chaîne IK composée d'objets.
- Une chaîne IK composée d'os.
- Une chàine IK composée d'un objet et d'un "Null Object".
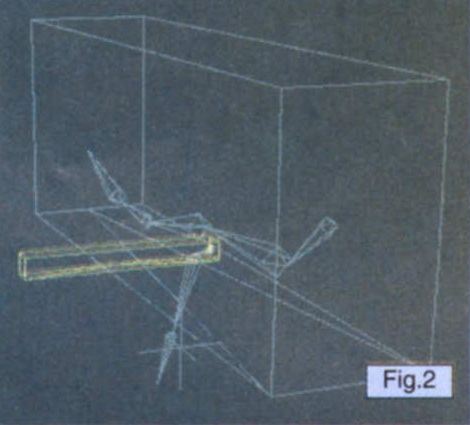
C'est la troisième possibilité qui vous permettra d'obtenir les meilleurs résultats. La simplicité de modélisation ne nuira
en aucun cas sur une animation plus que satisfaisante. En effet, un simple objet de base cubique (en jaune sur la figure 2)
modélisé à l'aide de la fonction "MetaNURBS" suffit.
Trois os sont utilisés pour assurer la déformation. Le "Null Object" situé en dessous, représente l'objet cible.
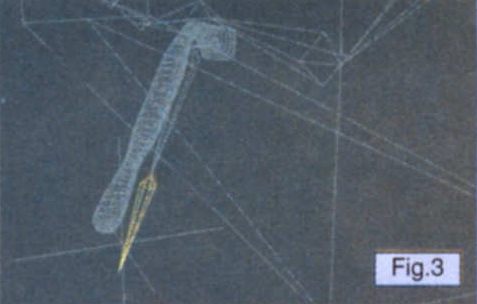
La figure 3 vous montre la qualité des déformations obtenues en utilisant les options de compensation (menu "Object").
L'os coloré en jaune est la terminaison de la chaîne IK. Si vous souhaitez obtenir des mouvements de cet os,
il est nécessaire cependant, de rajouter un "Null Object" à la chaîne IK. Il sera lié à l'os de terminaison (l'os en jaune)
et situé au sommet de ce dernier. En faisant un rapide calcul, vous constatez que pour un seul insecte à six pattes, six
objets "Goals" et 18 os sont nécessaires, cela en omettant les os nécessaires à l'animation du corps ("object support").
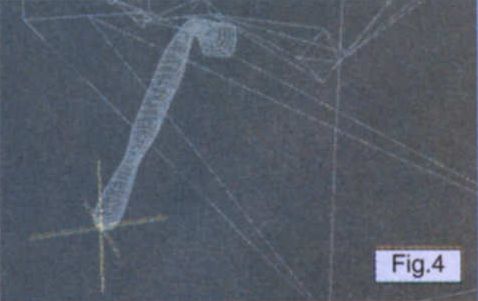
La quatrième possibilité (figure 4) est une chaîne IK composée d'un objet et d'un "Null Object". Il s'agit du principe
d'animation le plus simple. Dans un premier temps vous réalisez la déformation de vos pattes dans le modeleur pour ensuite
les associer dans une chaîne IK avec un "Null Object" (en jaune sur la figure 4). C'est ce "Null Object" qui termine la
chaîne. C'est également lui qui visera l'objet "Goal" afin d'obtenir un déplacement de la patte. Dans cette possibilité,
nous utilisons sox objets "Goals", six "Null Objects" et six objets (les pattes).
En fonction de l'aspect du terrain utilisé, un principe sera plus ou moins adéquat. La morphose sera très adaptée pour un
terrain plat. En revanche, pour un terrain très aléatoire, utilisez la troisième possibilité. La figure 5 devrait allumer
votre mèche d'idée... Joyeuse modélisation !
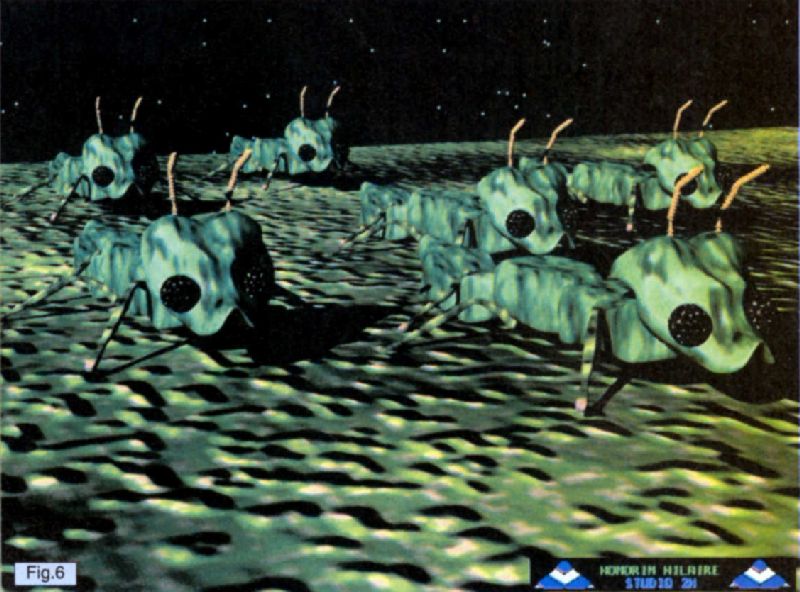
Note : pour animer cinq des six insectes (figure 6), je me suis servi des données d'un premier insecte.
Afin de ne pas obtenir une parfaite synchronisation de leurs mouvements, j'ai appliqué des décalages à l'aide des panels
"Motions Graphs" des os et des objets. Un bon conseil : si vous croisez cette colonie de morkilers, faites demi-tour.
Si vous êtes à court d'idées, allez voir le tout dernier film de Paul Verhoeven, Starship Troopers.
|