Suivez-nous sur X

|
|
|
0,
A,
B,
C,
D,
E,
F,
G,
H,
I,
J,
K,
L,
M,
N,
O,
P,
Q,
R,
S,
T,
U,
V,
W,
X,
Y,
Z,
ALL
|
|
0,
A,
B,
C,
D,
E,
F,
G,
H,
I,
J,
K,
L,
M,
N,
O,
P,
Q,
R,
S,
T,
U,
V,
W,
X,
Y,
Z
|
|
0,
A,
B,
C,
D,
E,
F,
G,
H,
I,
J,
K,
L,
M,
N,
O,
P,
Q,
R,
S,
T,
U,
V,
W,
X,
Y,
Z
|
|
A propos d'Obligement

|
|
David Brunet

|
|
|
|
En pratique : Mettre en place un compilateur croisé pour AROS sur Windows 10/11 avec WSL2
(Article écrit par Andrzej Subocz et extrait de arosnews.github.io - février 2024)
|
|
La compilation croisée consiste à développer un logiciel sur un système, destiné à être exécuté sur un autre.
Vous pouvez compiler un logiciel pour AROS à l'aide d'un portage AROS hébergé sur Linux. Sous Windows,
cela est possible grâce à WSL2 (Windows Subsystem for Linux 2).
Ce dont vous avez besoin
Pour installer WSL2, vous avez besoin de :
- Windows 10 de mai 2020 (version 2004) ou plus récent.
- Un ordinateur gérant la virtualisation Hyper-V.
- Un pilote installé pour vGPU.
Pour exécuter des applications avec interface graphique sous Linux, vous devez d'abord installer le
pilote ci-dessous correspondant à votre système. Cela vous permettra d'utiliser un processeur graphique
virtuel (vGPU), ce qui vous permettra de bénéficier d'un rendu OpenGL accéléré matériellement.
Installation de WSL2
Ouvrez l'invite de commande avec les privilèges d'administrateur et tapez :
wsl --install -d ubuntu-22.04
|
Une fois l'opération terminée, redémarrez l'ordinateur. Connectez-vous à Windows et l'invite de commande
s'ouvrira à nouveau. Cette fois, vous serez guidé dans la configuration d'Ubuntu à l'aide d'un nom
d'utilisateur et d'un mot de passe (ils peuvent être différents de ceux de Windows).
Vous pouvez maintenant exécuter l'application Ubuntu à partir du menu Démarrer pour commencer, ou bien
installer l'application Microsoft Terminal.
Pour mettre à jour les paquets de votre Ubuntu fraîchement installé, tapez la commande :
sudo apt update && sudo apt upgrade
|
Du côté Windows, vous avez facilement accès au système de fichiers Ubuntu en tapant "\\wsl$\Ubuntu-22.04"
dans l'explorateur de fichiers.
Installation d'AROS x86_86 hébergé sur WSL2
Installez tous les paquets requis. Vous pouvez faire cela en une seule commande (sur une seule ligne) :
|
sudo apt install git gcc g++ make gawk bison flex bzip2 netpbm autoconf automake libx11-dev libxext-dev libc6-dev liblzo2-dev libxxf86vm-dev libpng-dev gcc-multilib libsdl1.2-dev byacc python3-mako libxcursor-dev cmake genisoimage dh-make unzip
|
Pour cette installation, créez un répertoire nommé "myprojects" dans votre répertoire utilisateur Ubuntu,
ainsi qu'un autre répertoire nommé "arosbuilds". Clonez ensuite le dépôt AROS depuis le
GitHub de Krzysztof Smiechowicz et copiez le fichier "rebuild.sh" du répertoire "AROS" vers le répertoire
"arosbuilds". Voici une séquence de commandes pour faire tout cela :
mkdir myprojects
cd myprojects
mkdir arosbuilds
cd arosbuilds
git clone https://github.com/deadwood2/AROS.git AROS
cp ./AROS/scripts/rebuild.sh .
|
Exécutez le script rebuild.sh :
Sélectionnez "toolchain-core-x86_64" :
Une fois terminé, exécutez à nouveau le script "rebuild.sh", mais cette fois sélectionnez "core-linux-x86_64 (DEBUG)" :
2) core-linux-x86_64 (DEBUG)
|
Une connexion réseau est requise pendant la compilation, car des sources supplémentaires sont téléchargées
depuis le réseau. En cas de problème réseau, le téléchargement échouera. La première solution consiste à
répéter la dernière étape du processus et le téléchargement pourrait fonctionner (si le problème réseau était
temporaire). Si cela ne fonctionne pas, consultez le journal : vous y trouverez les URL depuis lesquelles le
processus de compilation tente de télécharger les fichiers. Utilisez cette URL pour télécharger les fichiers
manuellement via le navigateur, puis placez-les dans le répertoire "portssources". Il peut également être
nécessaire de supprimer certains fichiers temporaires du répertoire "portssources" portant des noms
similaires à ceux téléchargés (fichiers portant l'extension *.fetch).
Une fois l'opération terminée, AROS est alors installé. Vous pouvez l'exécuter en exécutant le fichier "AROSBootstrap" :
cd core-linux-x86_64-d/bin/linux-x86_64/AROS
./boot/linux/AROSBootstrap
|
Si vous souhaitez exécuter AROS avec une certaine quantité de mémoire, utilisez le paramètre "-m",
par exemple, "-m 1024" pour 1 Go de mémoire.
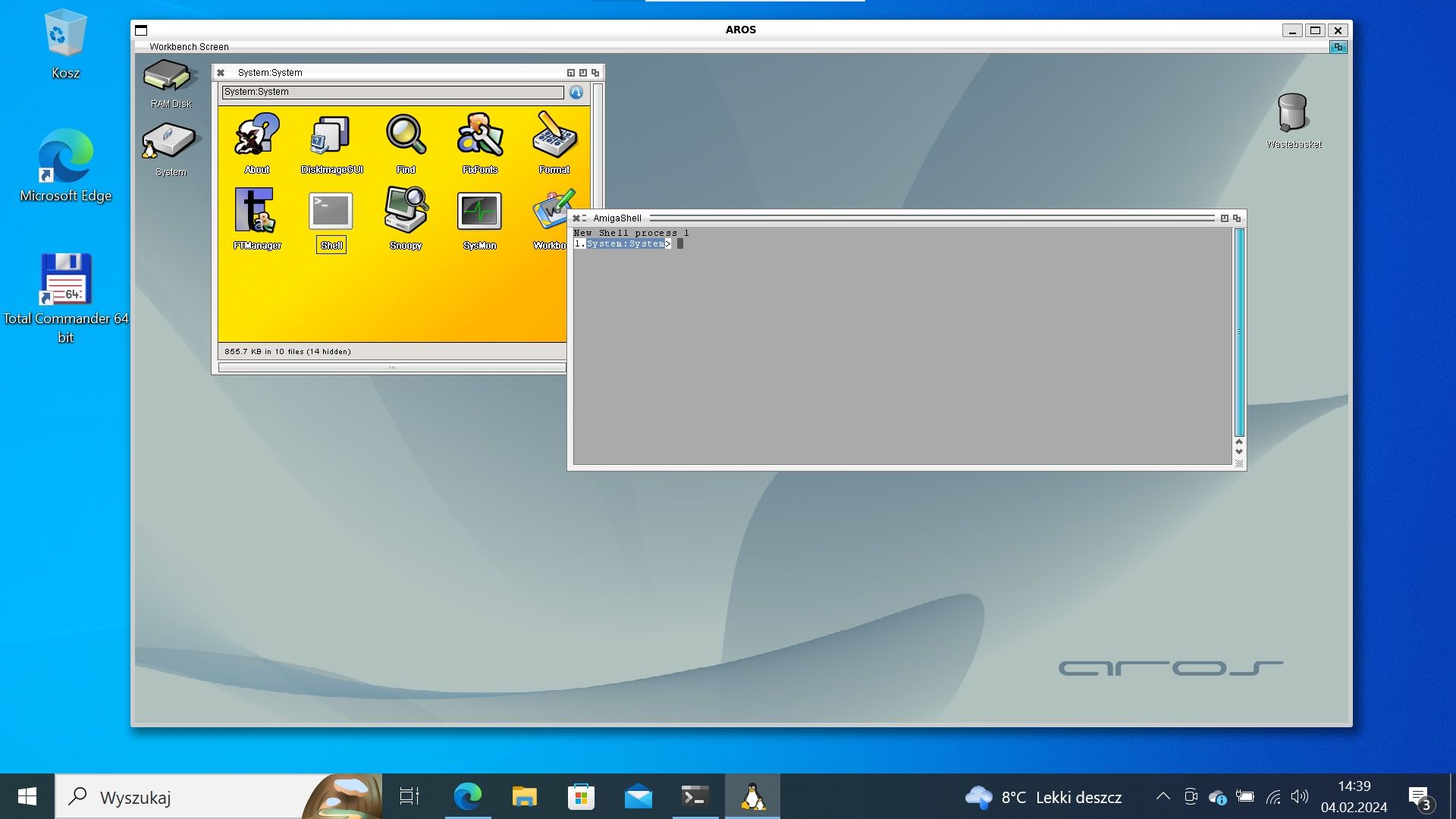 AROS x86_64 sur WSL2
AROS x86_64 sur WSL2
Sous Ubuntu, vous pouvez utiliser un script qui configurera la connexion réseau pour AROS. Créez un
script nommé "startaros.sh" dans votre répertoire personnel pour configurer le réseau, puis démarrer
AROS avec 1 Go de mémoire :
#!/bin/sh
NETON=`ifconfig | grep aros0`
if [ "$NETON" = "" ]; then
echo "Installing bridge network... (sudo access required)"
sudo tunctl -b -u "$USER" -t aros0
sudo ifconfig aros0 192.168.166.1
sudo iptables -t nat -A POSTROUTING -o eth0 -s 192.168.166.0/2 -j MASQUERADE
sudo iptables -t nat -A POSTROUTING -o wlan0 -s 192.168.166.0/2 -j MASQUERADE
sudo sh -c "echo 1 > /proc/sys/net/ipv4/ip_forward"
fi
cd myprojects/arosbuilds/core-linux-x86_64-d/bin/linux-x86_64/AROS
./boot/linux/AROSBootstrap -m 1024
|
Si votre interface réseau a un nom autre que "eth0", n'oubliez pas de le modifier dans le script.
Pour pouvoir exécuter le script, modifiez les attributs du fichier créé :
Le script ci-dessus nécessite également l'installation de paquets supplémentaires pour fonctionner :
sudo apt install net-tools uml-utilities
|
Du côté AROS, dans "Prefs/Network", sélectionnez l'interface "tap.device" et définissez manuellement les
adresses IP comme dans la capture d'écran suivante :
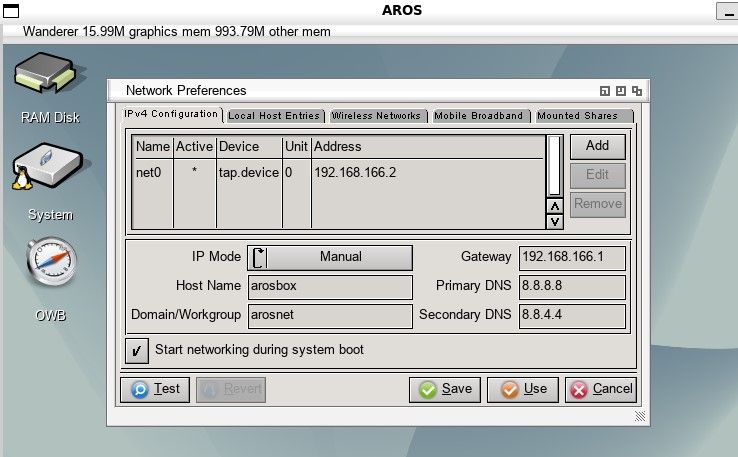 Configuration réseau dans AROS hébergé sur WSL2
Configuration réseau dans AROS hébergé sur WSL2
L'étape suivante consistera à compiler la contribution afin que vous ayez l'intégralité de la trousse de
développement AROS à votre disposition :
git clone https://github.com/deadwood2/contrib.git contrib
cd contrib
git checkout master
|
Déplacez le répertoire "contrib" téléchargé vers le répertoire "AROS" (de façon à obtenir "AROS/contrib").
Accédez ensuite au répertoire "core-linux-x86_64-d" et exécutez la commande :
Si vous avez un processeur multicoeur, vous pouvez utiliser la commande "make" avec le paramètre "-j"
(par exemple "make -j4 contrib") pour accélérer légèrement le processus de construction en utilisant
plus de fils d'exécution.
Créez le répertoire "cross-x86_64-aros" au même niveau que les répertoires "AROS" et "core-linux-x86_64-d" :
Créez ensuite un fichier nommé "x86_64-aros-gcc" avec le contenu suivant (sur une seule ligne) :
|
exec /home/username/myprojects/arosbuilds/toolchain-core-x86_64/x86_64-aros-gcc --sysroot=/home/username/myprojects/arosbuilds/core-linux-x86_64-d/bin/linux-x86_64/AROS/Development "$@"
|
Et définissez-lui des attributs :
chmod 755 x86_64-aros-gcc
|
La dernière étape consiste à ajouter le répertoire "cross-x86_64-aros" au chemin ("PATH").
Pour le faire de manière permanente, ouvrez le fichier ".bashrc" situé dans votre répertoire utilisateur
et ajoutez la ligne suivante à la fin :
export PATH=$PATH:/home/username/myprojects/arosbuilds/cross-x86_64-aros
|
N'oubliez pas de mettre votre nom d'utilisateur dans les chemins ("PATH").
Si tout s'est bien passé, en tapant "x86_64-aros-gcc", vous devriez avoir un compilateur fonctionnel :
x86_64-aros-gcc -o hello hello.c
|
Si vous voulez installer la version i386, vous devez modifier certaines commandes. Commencez par mettre à jour
les paquets requis (sur une seule ligne pour la troisième commande) :
sudo dpkg --add-architecture i386
|
sudo apt update && sudo apt upgrade
|
|
sudo apt install subversion git-core gcc g++ make gawk bison flex bzip2 netpbm autoconf automake libx11-dev libxext-dev libc6-dev liblzo2-dev libxxf86vm-dev libxxf86vm-dev:i386 libpng-dev gcc-multilib libsdl1.2-dev byacc python3-mako libxcursor-dev libxcursor1:i386 cmake zsh mingw-w64 genisoimage dh-make unzip
|
Clonez le dépôt AROS de GitHub :
$ mkdir myrepo
$ cd myrepo
$ git clone https://github.com/deadwood2/AROS.git AROS
$ cd AROS
$ git checkout alt-abiv0
$ cd ..
$ cp ./AROS/scripts/rebuild.sh .
|
Exécutez le script "rebuild.sh" :
Sélectionnez l'option "toolchain-alt-abiv0-i386" :
1) toolchain-alt-abiv0-i386
|
Une fois terminé, exécutez à nouveau le script "rebuild.sh", cette fois en sélectionnant l'option "alt-abiv0-linux-i386 (DEBUG)" :
3) alt-abiv0-linux-i386 (DEBUG)
|
Une fois l'opération terminée, AROS est installé. Vous pouvez le démarrer en exécutant le fichier "AROSBootstrap" :
cd alt-abiv0-linux-i386-d/bin/linux-i386/AROS
./Arch/linux/AROSBootstrap
|
Compilez la contribution :
git clone https://github.com/deadwood2/contrib.git contrib
cd contrib
git checkout alt-abiv0
|
Déplacez le répertoire "contrib" téléchargé vers le répertoire "AROS" (de façon à obtenir "AROS/contrib").
Accédez ensuite au répertoire "alt-abiv0-linux-i386-d" et exécutez la commande :
Créez le répertoire "cross-i386-aros" au même niveau que les répertoires "AROS" et "alt-abiv0-linux-i386-d" :
Créez ensuite un fichier nommé "i386-aros-gcc" avec le contenu suivant :
|
exec /home/username/myrepo/toolchain-alt-abiv0-i386/i386-aros-gcc --sysroot=/home/username/myrepo/alt-abiv0-linux-i386-d/bin/linux-i386/AROS/Development "$@"
|
Et définissez-lui les attributs :
La dernière étape consiste à ajouter le répertoire "cross-i386-aros" au chemin ("PATH"). Pour ce faire,
ouvrez définitivement le fichier ".bashrc", situé dans votre répertoire utilisateur, et ajoutez la
ligne suivante à la fin :
export PATH=$PATH:/home/username/myrepo/cross-i386-aros
|
|













